[ad_1]
Robotics is currently exploring how to enhance complex control tasks, such as manipulating objects or handling deformable materials. This research niche is crucial as it promises to bridge the gap between current robotic capabilities and the nuanced dexterity found in human actions.
A central challenge in this area is developing models that can accurately indicate the outcomes of robotic actions in dynamic environments. Particularly in tasks involving intricate contact dynamics, there’s a need for models that can adeptly handle complexity without compromising accuracy. The crux of the problem is creating models that can efficiently navigate these demanding scenarios while delivering reliable performance.
Conventional methods in this field have heavily relied on deep neural networks (DNNs) due to their exceptional ability to model complex patterns. However, the high nonlinearity of DNNs presents significant challenges in planning and control tasks. These tasks often necessitate extensive computational methods, such as sampling or gradient descent, which can fall short in scenarios requiring complex, long-horizon planning.
To address these limitations, a framework has been introduced by researchers from Cornell University, Stanford University, Massachusetts Institute of Technology, and University of Illinois Urbana-Champaign. This framework revolves around the concept of sparsifying neural dynamics models. Sparsification is a process that aims to streamline the model by systematically reducing its nonlinearity. This is achieved by selectively removing or replacing neurons, rendering the model more tractable for optimization processes.
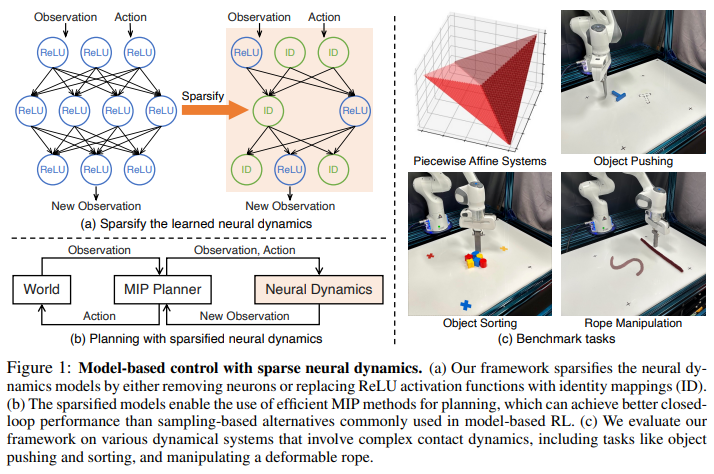
The essence of this sparsification process is to strike a balance between the simplicity of the model and its functional performance. By carefully reducing the model’s nonlinearity, the researchers have maintained a commendable level of prediction accuracy. This simplification enables the efficient application of mixed-integer programming in model-based control, thereby improving the model’s performance in closed-loop control scenarios.
Empirical results underscore the effectiveness of this approach. Despite their streamlined architecture, the sparsified models perform on par with or better than their more complex counterparts in predictive accuracy and closed-loop control tasks. This equilibrium between simplicity and efficiency is particularly noteworthy, as it suggests a sweet spot where the models retain sufficient predictive power while benefiting from more effective optimization tools.
This research represents a significant leap in the field of robotics, highlighting the potential of simpler yet effective models in enhancing the efficiency and adaptability of robotic control systems. The study conducted can be presented in a nutshell in the following points:
- Crafting predictive models for complex automated control tasks.
- Reduction of model complexity through neural network sparsification.
- Gradual decrease of nonlinearity in neural models, optimizing them for efficient use in automatic control.
Check out the Paper. All credit for this research goes to the researchers of this project. Also, don’t forget to join our 35k+ ML SubReddit, 41k+ Facebook Community, Discord Channel, and Email Newsletter, where we share the latest AI research news, cool AI projects, and more.
If you like our work, you will love our newsletter..
Hello, My name is Adnan Hassan. I am a consulting intern at Marktechpost and soon to be a management trainee at American Express. I am currently pursuing a dual degree at the Indian Institute of Technology, Kharagpur. I am passionate about technology and want to create new products that make a difference.
[ad_2]
Source link